Finding a New Representation of the Given Equation after Rotating through a Given Angle
Until now, we have looked at equations of conic sections without an [latex]xy[/latex] term, which aligns the graphs with the x- and y-axes. When we add an [latex]xy[/latex] term, we are rotating the conic about the origin. If the x- and y-axes are rotated through an angle, say [latex]\theta [/latex], then every point on the plane may be thought of as having two representations: [latex]\left(x,y\right)[/latex] on the Cartesian plane with the original x-axis and y-axis, and [latex]\left({x}^{\prime },{y}^{\prime }\right)[/latex] on the new plane defined by the new, rotated axes, called the x'-axis and y'-axis.
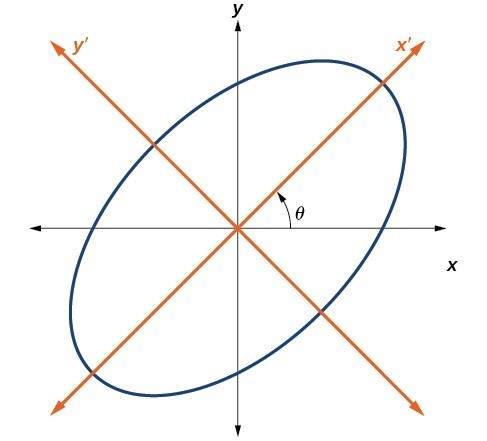 Figure 3. The graph of the rotated ellipse [latex]{x}^{2}+{y}^{2}-xy - 15=0[/latex]
Figure 3. The graph of the rotated ellipse [latex]{x}^{2}+{y}^{2}-xy - 15=0[/latex]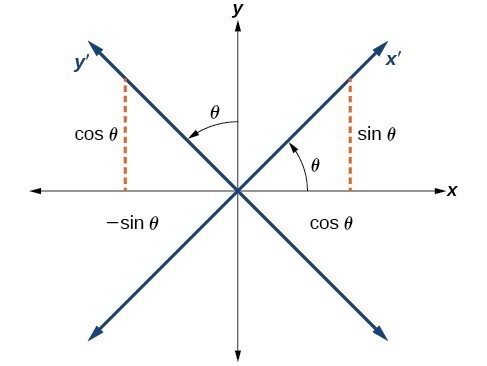 Figure 4. The Cartesian plane with x- and y-axes and the resulting x′− and y′−axes formed by a rotation by an angle [latex]\text{ }\theta [/latex].
Figure 4. The Cartesian plane with x- and y-axes and the resulting x′− and y′−axes formed by a rotation by an angle [latex]\text{ }\theta [/latex].[latex]\begin{array}{l}{i}^{\prime }=\cos \text{ }\theta i+\sin \text{ }\theta j\hfill \\ {j}^{\prime }=-\sin \text{ }\theta i+\cos \text{ }\theta j\hfill \end{array}[/latex]
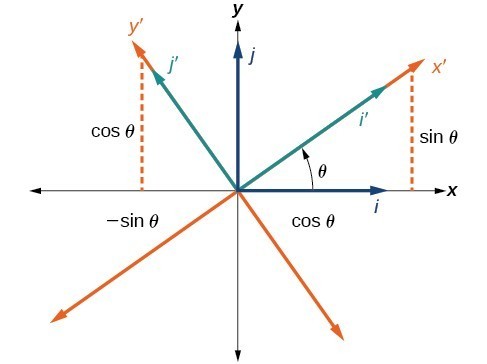 Figure 5. Relationship between the old and new coordinate planes.
Figure 5. Relationship between the old and new coordinate planes.[latex]\begin{array}{ll}u={x}^{\prime }{i}^{\prime }+{y}^{\prime }{j}^{\prime }\hfill & \hfill \\ u={x}^{\prime }\left(i\text{ }\cos \text{ }\theta +j\text{ }\sin \text{ }\theta \right)+{y}^{\prime }\left(-i\text{ }\sin \text{ }\theta +j\text{ }\cos \text{ }\theta \right)\hfill & \begin{array}{cccc}& & & \end{array}\text{Substitute}.\hfill \\ u=ix\text{'}\text{ }\cos \text{ }\theta +jx\text{'}\text{ }\sin \text{ }\theta -iy\text{'}\text{ }\sin \text{ }\theta +jy\text{'}\text{ }\cos \text{ }\theta \hfill & \begin{array}{cccc}& & & \end{array}\text{Distribute}.\hfill \\ u=ix\text{'}\text{ }\cos \text{ }\theta -iy\text{'}\text{ }\sin \text{ }\theta +jx\text{'}\text{ }\sin \text{ }\theta +jy\text{'}\text{ }\cos \text{ }\theta \hfill & \begin{array}{cccc}& & & \end{array}\text{Apply commutative property}.\hfill \\ u=\left(x\text{'}\text{ }\cos \text{ }\theta -y\text{'}\text{ }\sin \text{ }\theta \right)i+\left(x\text{'}\text{ }\sin \text{ }\theta +y\text{'}\text{ }\cos \text{ }\theta \right)j\hfill & \begin{array}{cccc}& & & \end{array}\text{Factor by grouping}.\hfill \end{array}[/latex]
Because [latex]u={x}^{\prime }{i}^{\prime }+{y}^{\prime }{j}^{\prime }[/latex], we have representations of [latex]x[/latex] and [latex]y[/latex] in terms of the new coordinate system.
[latex]\begin{array}{c}x={x}^{\prime }\cos \text{ }\theta -{y}^{\prime }\sin \text{ }\theta \\ \text{and}\\ y={x}^{\prime }\sin \text{ }\theta +{y}^{\prime }\cos \text{ }\theta \end{array}[/latex]
A General Note: Equations of Rotation
If a point [latex]\left(x,y\right)[/latex] on the Cartesian plane is represented on a new coordinate plane where the axes of rotation are formed by rotating an angle [latex]\theta [/latex] from the positive x-axis, then the coordinates of the point with respect to the new axes are [latex]\left({x}^{\prime },{y}^{\prime }\right)[/latex]. We can use the following equations of rotation to define the relationship between [latex]\left(x,y\right)[/latex] and [latex]\left({x}^{\prime },{y}^{\prime }\right):[/latex][latex]x={x}^{\prime }\cos \text{ }\theta -{y}^{\prime }\sin \text{ }\theta [/latex]
and
[latex]y={x}^{\prime }\sin \text{ }\theta +{y}^{\prime }\cos \text{ }\theta [/latex]
How To: Given the equation of a conic, find a new representation after rotating through an angle.
- Find [latex]x[/latex] and [latex]y[/latex] where [latex]x={x}^{\prime }\cos \text{ }\theta -{y}^{\prime }\sin \text{ }\theta [/latex] and [latex]y={x}^{\prime }\sin \text{ }\theta +{y}^{\prime }\cos \text{ }\theta [/latex].
- Substitute the expression for [latex]x[/latex] and [latex]y[/latex] into in the given equation, then simplify.
- Write the equations with [latex]{x}^{\prime }[/latex] and [latex]{y}^{\prime }[/latex] in standard form.
Example 2: Finding a New Representation of an Equation after Rotating through a Given Angle
Find a new representation of the equation [latex]2{x}^{2}-xy+2{y}^{2}-30=0[/latex] after rotating through an angle of [latex]\theta =45^\circ [/latex].Solution
Find [latex]x[/latex] and [latex]y[/latex], where [latex]x={x}^{\prime }\cos \text{ }\theta -{y}^{\prime }\sin \text{ }\theta [/latex] and [latex]y={x}^{\prime }\sin \text{ }\theta +{y}^{\prime }\cos \text{ }\theta [/latex]. Because [latex]\theta =45^\circ [/latex],[latex]\begin{array}{l}\hfill \\ x={x}^{\prime }\cos \left(45^\circ \right)-{y}^{\prime }\sin \left(45^\circ \right)\hfill \\ x={x}^{\prime }\left(\frac{1}{\sqrt{2}}\right)-{y}^{\prime }\left(\frac{1}{\sqrt{2}}\right)\hfill \\ x=\frac{{x}^{\prime }-{y}^{\prime }}{\sqrt{2}}\hfill \end{array}[/latex]
and
[latex]\begin{array}{l}\\ \begin{array}{l}y={x}^{\prime }\sin \left(45^\circ \right)+{y}^{\prime }\cos \left(45^\circ \right)\hfill \\ y={x}^{\prime }\left(\frac{1}{\sqrt{2}}\right)+{y}^{\prime }\left(\frac{1}{\sqrt{2}}\right)\hfill \\ y=\frac{{x}^{\prime }+{y}^{\prime }}{\sqrt{2}}\hfill \end{array}\end{array}[/latex]
Substitute [latex]x={x}^{\prime }\cos \theta -{y}^{\prime }\sin \theta [/latex] and [latex]y={x}^{\prime }\sin \text{ }\theta +{y}^{\prime }\cos \text{ }\theta [/latex] into [latex]2{x}^{2}-xy+2{y}^{2}-30=0[/latex].
[latex]2{\left(\frac{{x}^{\prime }-{y}^{\prime }}{\sqrt{2}}\right)}^{2}-\left(\frac{{x}^{\prime }-{y}^{\prime }}{\sqrt{2}}\right)\left(\frac{{x}^{\prime }+{y}^{\prime }}{\sqrt{2}}\right)+2{\left(\frac{{x}^{\prime }+{y}^{\prime }}{\sqrt{2}}\right)}^{2}-30=0[/latex]
Simplify.
[latex]\begin{array}{ll}\overline{)2}\frac{\left({x}^{\prime }-{y}^{\prime }\right)\left({x}^{\prime }-{y}^{\prime }\right)}{\overline{)2}}-\frac{\left({x}^{\prime }-{y}^{\prime }\right)\left({x}^{\prime }+{y}^{\prime }\right)}{2}+\overline{)2}\frac{\left({x}^{\prime }+{y}^{\prime }\right)\left({x}^{\prime }+{y}^{\prime }\right)}{\overline{)2}}-30=0\hfill & \begin{array}{cccc}& & & \end{array}\text{FOIL method}\hfill \\ \text{ }{x}^{\prime }{}^{2}{\overline{)-2{x}^{\prime }y}}^{\prime }+{y}^{\prime }{}^{2}-\frac{\left({x}^{\prime }{}^{2}-{y}^{\prime }{}^{2}\right)}{2}+{x}^{\prime }{}^{2}\overline{)+2{x}^{\prime }{y}^{\prime }}+{y}^{\prime }{}^{2}-30=0\hfill & \begin{array}{cccc}& & & \end{array}\text{Combine like terms}.\hfill \\ \text{ }2{x}^{\prime }{}^{2}+2{y}^{\prime }{}^{2}-\frac{\left({x}^{\prime }{}^{2}-{y}^{\prime }{}^{2}\right)}{2}=30\hfill & \begin{array}{cccc}& & & \end{array}\text{Combine like terms}.\hfill \\ \text{ }2\left(2{x}^{\prime }{}^{2}+2{y}^{\prime }{}^{2}-\frac{\left({x}^{\prime }{}^{2}-{y}^{\prime }{}^{2}\right)}{2}\right)=2\left(30\right)\hfill & \begin{array}{cccc}& & & \end{array}\text{Multiply both sides by 2}.\hfill \\ \text{ }4{x}^{\prime }{}^{2}+4{y}^{\prime }{}^{2}-\left({x}^{\prime }{}^{2}-{y}^{\prime }{}^{2}\right)=60\hfill & \begin{array}{cccc}& & & \end{array}\text{Simplify}.\hfill \\ \text{ }4{x}^{\prime }{}^{2}+4{y}^{\prime }{}^{2}-{x}^{\prime }{}^{2}+{y}^{\prime }{}^{2}=60\hfill & \begin{array}{cccc}& & & \end{array}\text{Distribute}.\hfill \\ \text{ }\frac{3{x}^{\prime }{}^{2}}{60}+\frac{5{y}^{\prime }{}^{2}}{60}=\frac{60}{60}\hfill & \begin{array}{cccc}& & & \end{array}\text{Set equal to 1}.\hfill \end{array}[/latex]
Write the equations with [latex]{x}^{\prime }[/latex] and [latex]{y}^{\prime }[/latex] in the standard form.
[latex]\frac{{{x}^{\prime }}^{2}}{20}+\frac{{{y}^{\prime }}^{2}}{12}=1[/latex]
This equation is an ellipse. Figure 6 shows the graph.
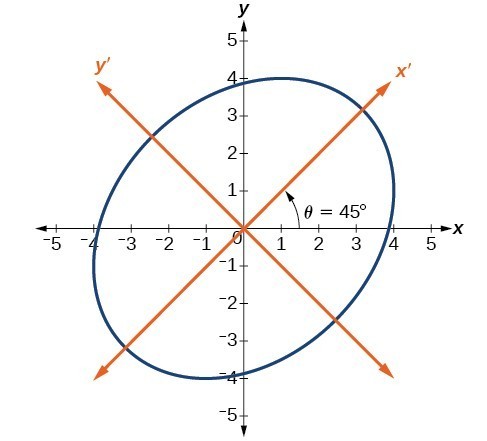 Figure 6
Figure 6Licenses & Attributions
CC licensed content, Specific attribution
- Precalculus. Provided by: OpenStax Authored by: OpenStax College. Located at: https://cnx.org/contents/[email protected]:1/Preface. License: CC BY: Attribution.
